Dans la fiche 01, on a appris à localiser un point grâce au vecteur position OM→. Maintenant les objets bougent — on veut décrire comment ils se déplacent entre deux instants.
Un point part de M1 (position initiale) et arrive en M2 (position finale). Le vecteur déplacement relie directement M1 à M2, en ligne droite, quelle que soit la trajectoire réellement empruntée.
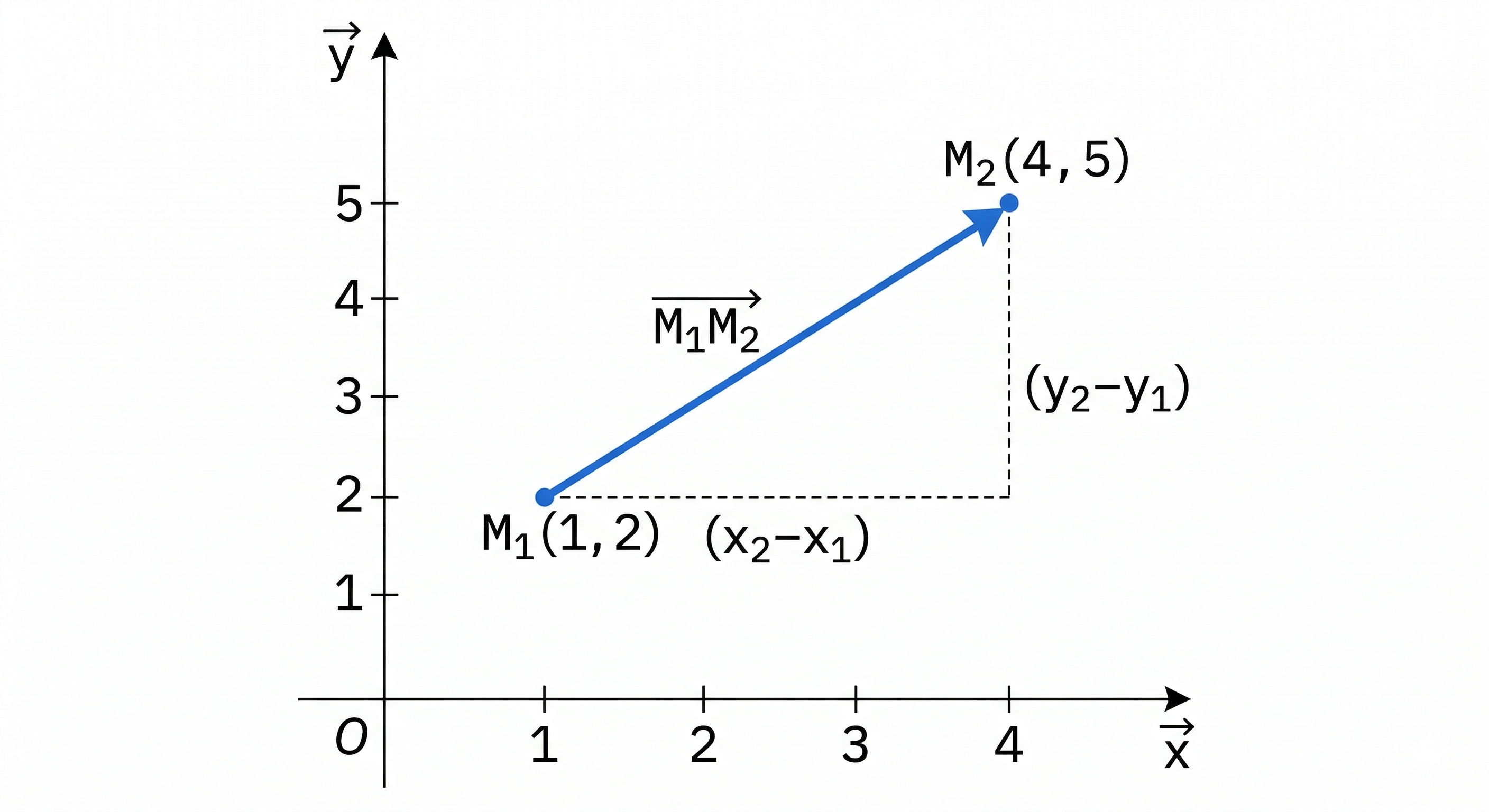
Le vecteur déplacement M1M2→ est la différence des vecteurs position : position finale moins position initiale.
En coordonnées, avec M1(x1 ; y1) et M2(x2 ; y2) :
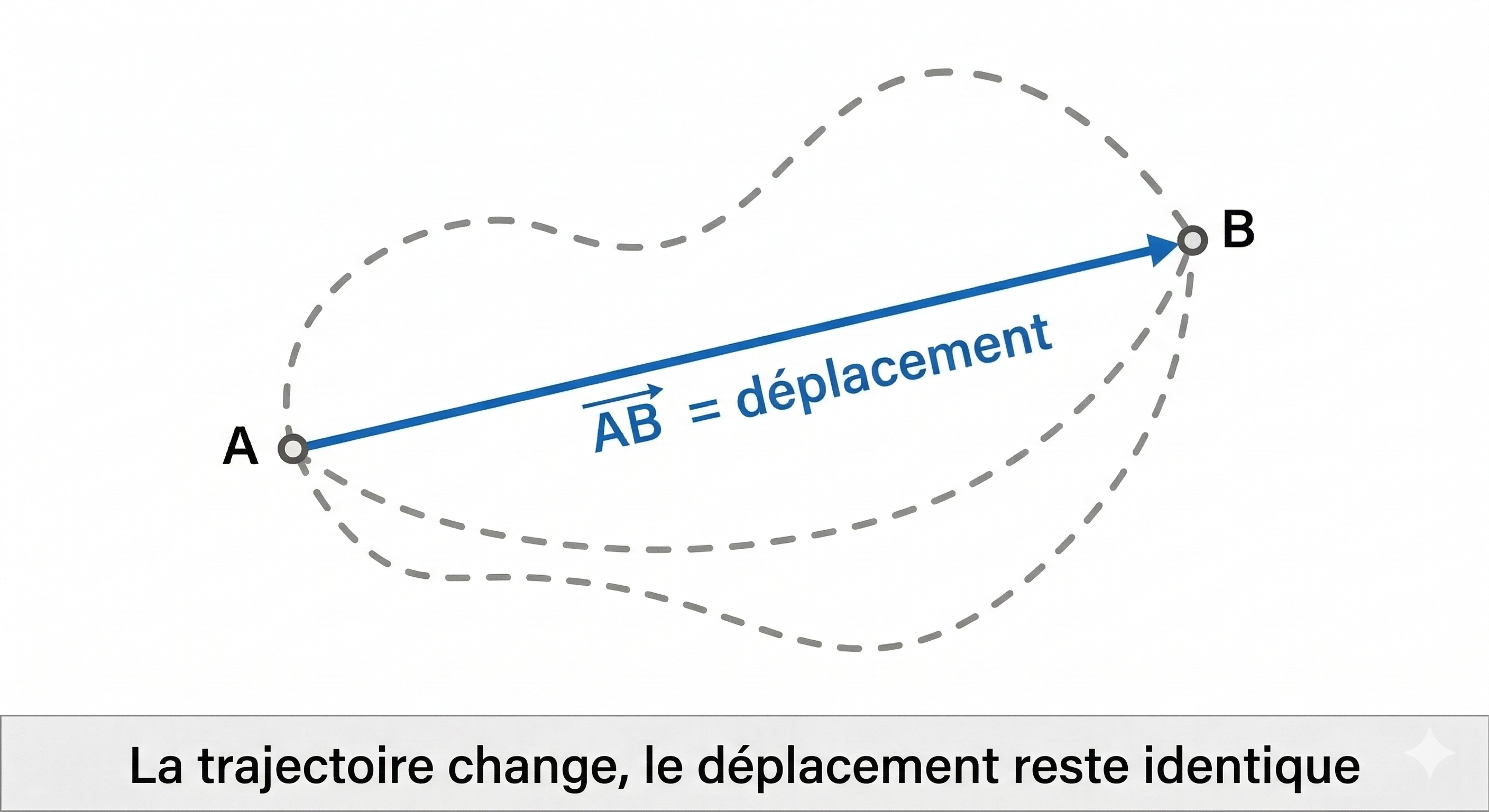
Que tu ailles de Paris à Lyon par l'autoroute, les petites routes ou en avion, le vecteur déplacement est identique — même direction, même sens, même norme (~392 km à vol d'oiseau). La distance parcourue change, pas le déplacement.
Déplacement ≠ distance parcourue. Le déplacement est un vecteur (direction + sens + norme). La distance est un scalaire (toujours positif). Aller-retour jusqu'au point de départ → distance > 0 mais déplacement = vecteur nul.
La norme ‖M1M2→‖ est la distance à vol d'oiseau entre les deux points :
En relativité générale d'Einstein, la masse courbe l'espace : le « chemin le plus court » n'est plus une droite mais une géodésique. La lumière des étoiles se courbe autour du Soleil parce qu'elle suit simplement le plus court chemin dans un espace courbé. Newton n'aurait pas aimé — et pourtant, c'est ce que le GPS corrige en permanence. 😄